
运动学

质点沿直线的运动学方程为x=10t+3t2, ⑴将坐标原点沿o-x正方向移动2m,运动学方程如何?初速度有无变化? ⑵将计时起点前移1s,运动学方程如何?初始坐标和初速度发生怎样的变化?加速度变不变?
关于2014版中的MassFX动力学模块中刚体的三种类型:动力学刚体、运动学刚体和静态刚体,下列说法错误的是()
A、动力学刚体的运动完全由模拟控制,它们会受重力和其他对象的撞击而发生运动
B、运动学刚体可使用标准方法设置动画,它们不可以是静止对象
C、运动学刚体可以影响模拟中的动力学刚体对象,但不会受动力学对象影响
D、在模拟过程中,运动学刚体对象可以随时切换为动态刚体
动态静力分析应用于()。
A、动力学正问题
B、运动学正问题
C、动力学反问题
D、运动学反问题
机械动力学的分析方法按功能分类可分为()
A、动力学反问题
B、动力学正问题
C、运动学正问题
D、运动学反问题
A速度增加,加速度减小
B速度增加,加速度增大
C速度减小,加速度增大
D速度减小,加速度减小
如下图所示,在机器人的手爪接触环境时,手爪力F与驱动力T1和T2的关系起重要作用,在静止状态下处理这种关系称为()。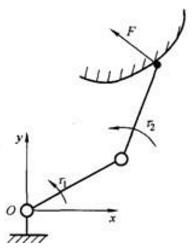
A、运动学
B、逆运动学
C、静力学
D、动力学
机器人在关节变量空间的轨迹或末端执行器在笛卡尔空间的轨迹已确定(轨迹已被规划),求解机器人各执行器的驱动力或力矩,这称为()。
A、正运动学
B、逆运动学
C、正动力学
D、逆动力学
对一给定的机器人,已知杆件几何参数和关节角矢量求机器人末端执行器相对于参考坐标系的位置和姿态。这属于()。
A、机器人正运动学
B、机器人逆运动学
C、机器人静力学
D、机器人动力学
已知机器人杆件的几何参数,给定机器人末端执行器相对于参考坐标系的期望位置和姿态(位姿),求取机器人使其末端执行器达到这个预期的位姿的关节变量。这属于()。
A、机器人正运动学
B、机器人逆运动学
C、机器人静力学
D、机器人动力学
A.分子平均动能决定分子速度
B.物体温度决定于分子平均动能
C.物体温度直接决定分子运动速度
D.分子速度受分子平均动能的牵制
⑴一简谐振动的规律为x=5cos(8t+π/4),若计时起点提前0.5s,其运动学方程如何表示?欲使其初相为零,计时起点应提前或推迟若干?⑵一简谐振动的运动学方程为x=8sin(3t-π),若计时起点推迟1s,它的初相是多少?欲使其初相为零,应怎样调整计时起点?⑶画出上面两种简谐振动在计时起点改变前后t=0时旋转矢量的位置。
对汽车做运动学分析时,轮胎半径应采用()。
A、自由半径
B、静力半径
C、动力半径
D、滚动半径
运动生物力学常用的运动学研究方法有()
A、测力台
B、影像解析
C、测速仪
D、功能仪
E、分段计时