
如下图所示,在机器人的手爪接触环境时,手爪力F与驱动力T1和T2的关系起重要作用,在静止状态下处理这种关系称为()。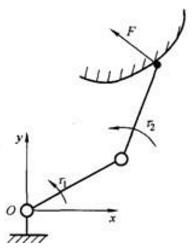
A、运动学
B、逆运动学
C、静力学
D、动力学
机器人在关节变量空间的轨迹或末端执行器在笛卡尔空间的轨迹已确定(轨迹已被规划),求解机器人各执行器的驱动力或力矩,这称为()。
A、正运动学
B、逆运动学
C、正动力学
D、逆动力学
A速度增加,加速度减小
B速度增加,加速度增大
C速度减小,加速度增大
D速度减小,加速度减小
⑴一简谐振动的规律为x=5cos(8t+π/4),若计时起点提前0.5s,其运动学方程如何表示?欲使其初相为零,计时起点应提前或推迟若干?⑵一简谐振动的运动学方程为x=8sin(3t-π),若计时起点推迟1s,它的初相是多少?欲使其初相为零,应怎样调整计时起点?⑶画出上面两种简谐振动在计时起点改变前后t=0时旋转矢量的位置。